Introduction
This page presents links to my graduate course projects at Arizona State University. Each project has a short description and an image to provide a quick overview of the project and a list of keywords. Keywords represent the relevant skills and important topics the project covers. Under each project description, click on the ‘Explore’ button to learn more or ‘Return to top’ to return to the Table of Contents which provides links by title to each project.
Please note, on mobile, some embedded pdfs may be unavailable.
Table of Contents
- Embedded Deep Learning Heart Rate Estimation Device
- Anatomy Inspired Animatronic Head
- Data Driven Dynamic Discovery of the PPG
- Reinforcement Learning in Real World Robotics Task Training with UR5
- PBVI for Motion Artifact and Sensor System Energy Savings
- Single Motor Foldable Paper Leg Robot
- Design of a Soft Passive Wearable Ankle Device
Embedded Deep Learning Heart Rate Estimation Device
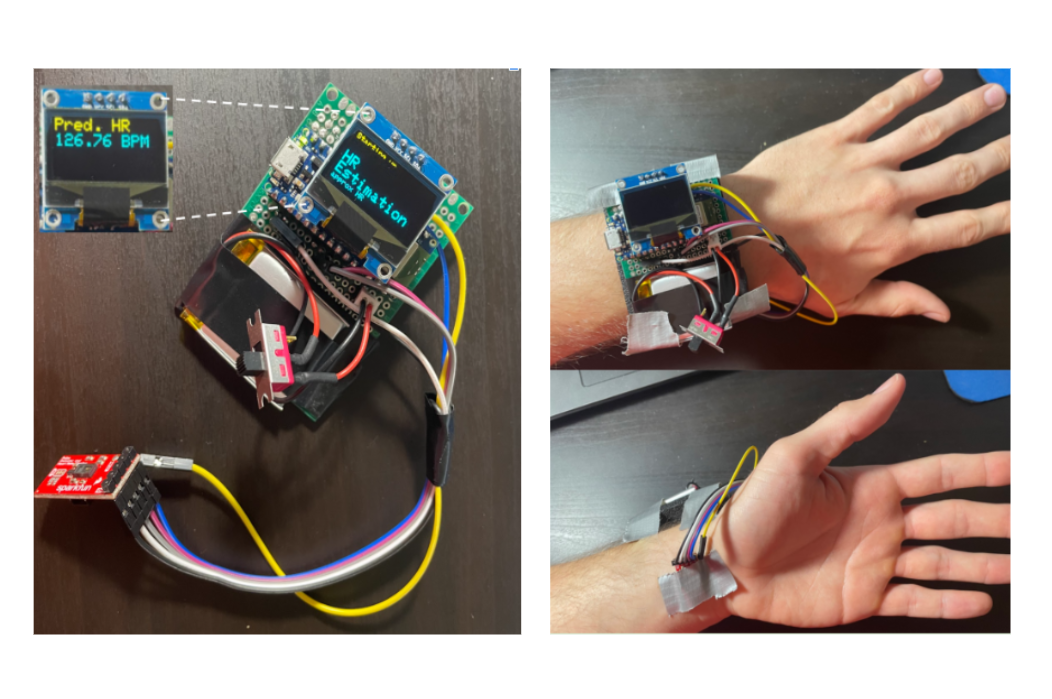
This project showcases an embedded heart rate (HR) estimation device. Using machine learning and TensorFlow lite, a trained algorithm can be deployed to an Arduino Nano 33 BLE Sense to make heart rate predictions in real time based on a wearable photoplethysmogram (PPG) and tri axial accelerometer.
Course: BMI598: Embedded Machine Learning (Spring 2022)
Project Type: Individual
Keywords: Embedded Machine Learning, Python, Arduino/C/C++, Sensor systems, Wearable Device
Return to top
Anatomy Inspired Animatronic Head
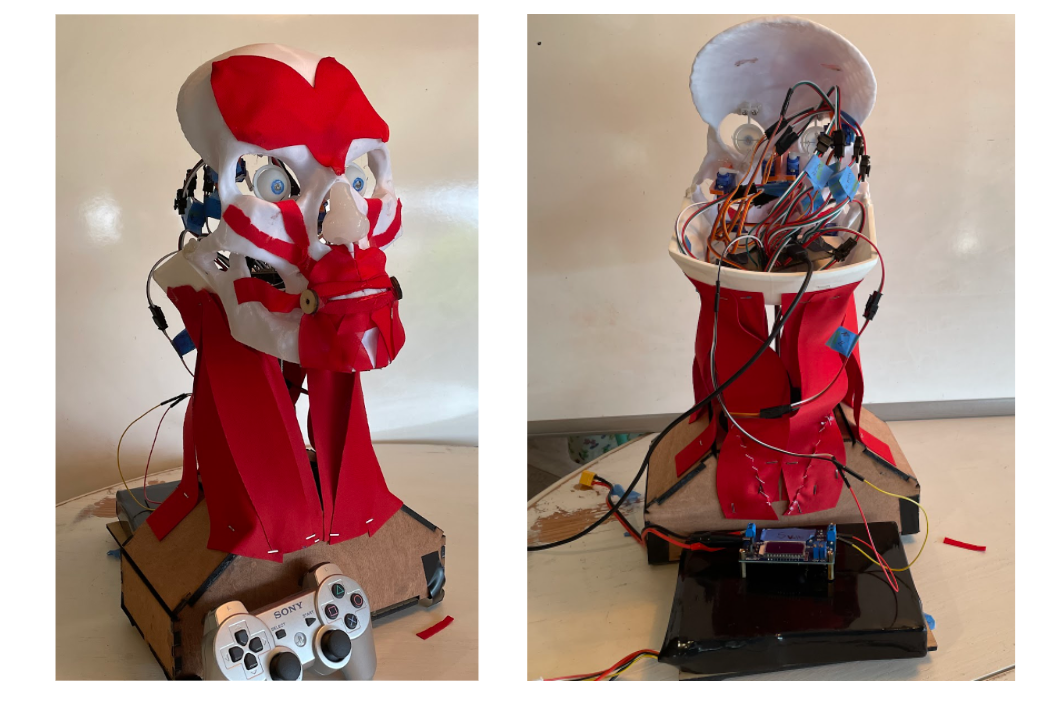
Deriving from anatomical inspiration, this project creates a fully controllable animatronic head through an ESP32, stepper motors, and a Bluetooth connected PS3 controller. This project allows for individual control of both eyes, each end of the lips, and the neck in 3 dimensions. Through kinematic calculations, the PS3 controller can be mapped to control the neck through real time rotations of the controller.
Course: AME598: Expressive Robotics (Spring 2022)
Project Type: Collaborative/Team
Keywords: ESP32, Arduino/C/C++, Solidworks, Kinematics, Bluetooth, Laser Cutting, 3D printing, Soldering
Return to top
Data Driven Dynamic Discovery of the PPG
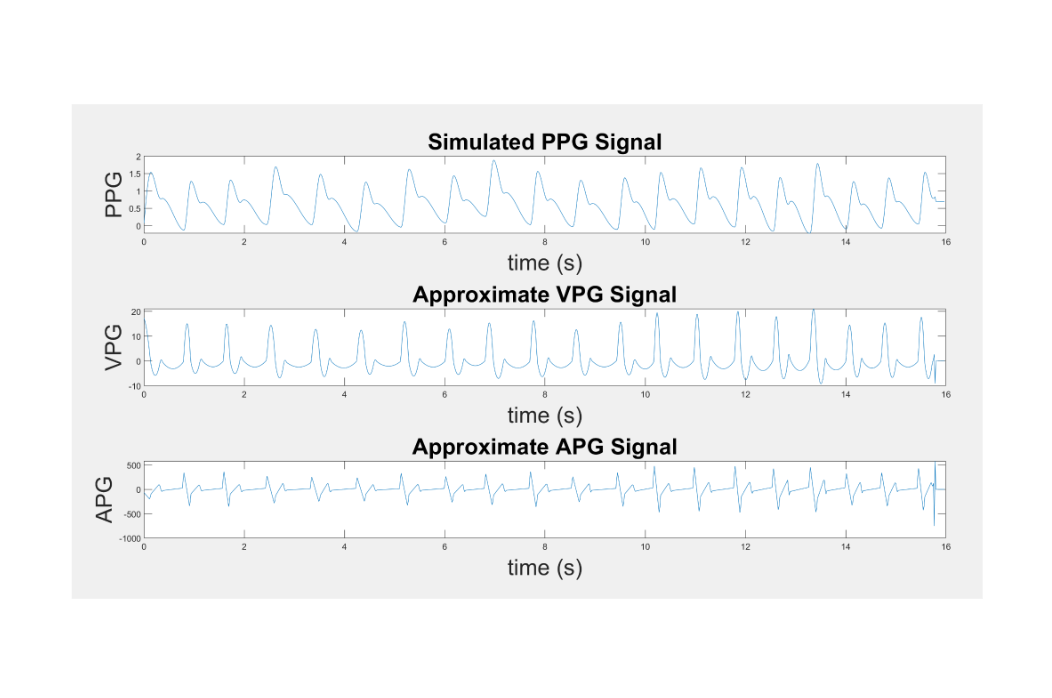
Data-Driven techniques have become a staple part of research including dynamic discovery. This utilizes datasets, such as time series data, to create mathematical descriptions of the underlying dynamics. This project starts the foundation by applying these techniques to a photoplethysmogram (PPG) signal, specifically, the techniques of time linear system identification and sparse identification of nonlinear dynamics (SINDY).
Course: EGR608: Advanced Simulation (Spring 2022)
Project Type: Individual
Keywords: Matlab, Time Series Signals, Data-Driven Discovery/SINDY, Linear Algebra
Return to top
Reinforcement Learning in Real World Robotics Task Training with UR5
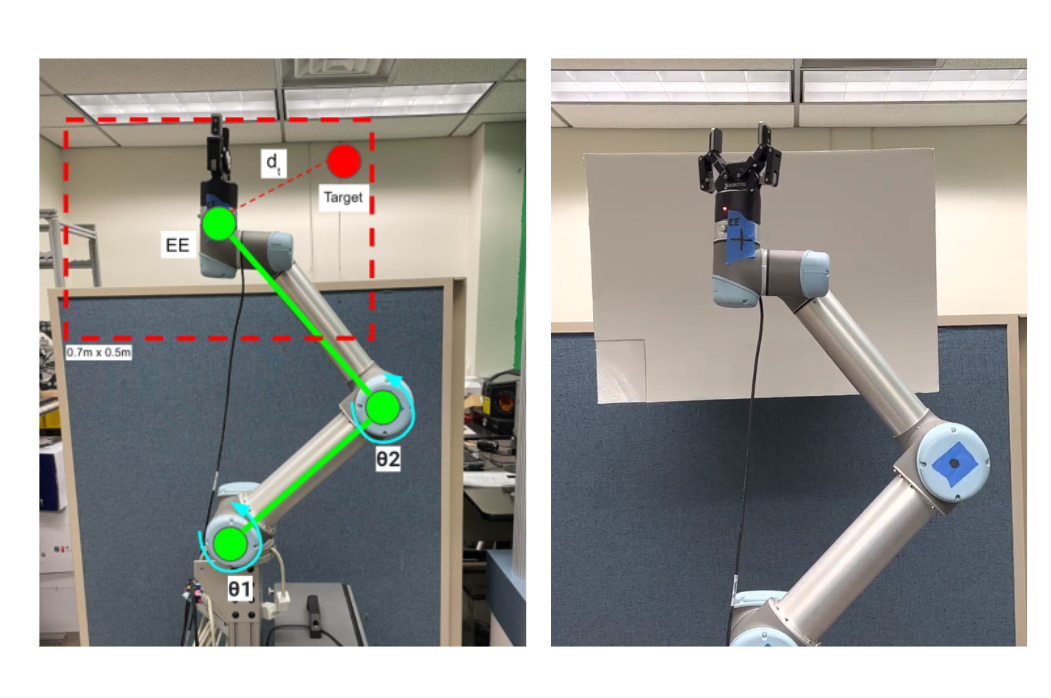
Reinforcement Learning (RL) reduces the mathematical complexity of robotic tasks such as reaching by rewarding or penalizing a system through a series of training tasks. This project improves the reproducibility of an RL project revolving around real reaching tasks with a UR5 arm. Overall, two methods of RL were applied to the UR5: trust region policy optimization (TRPO) and proximal policy optimization (PPO). These then trained in real time on the UR5 hardware, successfully training the UR5 arm to reach specific points in a 2D space optimally.
Course: EEE598: Reinforcement Learning (Fall 2021)
Project Type: Collaborative/Team
Keywords: Reinforcement Learning, Python, UR5, Ubuntu, Virtual Machine, Github, Docker
Return to top
PBVI for Motion Artifact and Sensor System Energy Savings
This work proposes a potential way to apply filters to reduce the motion artifacts of a photoplethysmogram (PPG) while also creating some sensor system energy savings. Through a Partial Observable Markov Decision Process (POMDP) framework and a Point Based Value Iteration (PBVI) algorithm, optimal actions can be selected to either observe accelerometer data for activity recognition, or choose to apply a noise reducing filter. This project is a theoretical approach and verifies that through the described methods, it would be possible to achieve energy savings and signal noise reduction while maintaining a high state prediction accuracy.
Course: EEE598: Learning Based Sequential Decision Making (Fall 2021)
Project Type: Individual
Keywords: Matlab, Partially Observable Markov Decision Process (POMDP)/ Point Based Value Iteration (PBVI), Markov Chains
Return to top
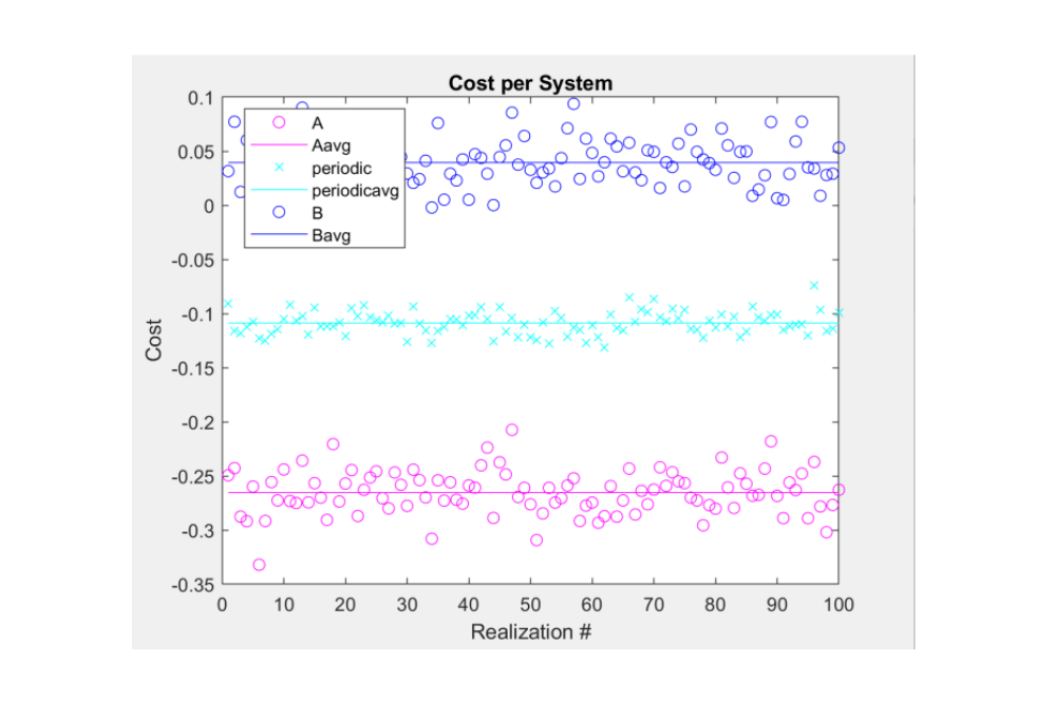
Single Motor Foldable Paper Leg Robot
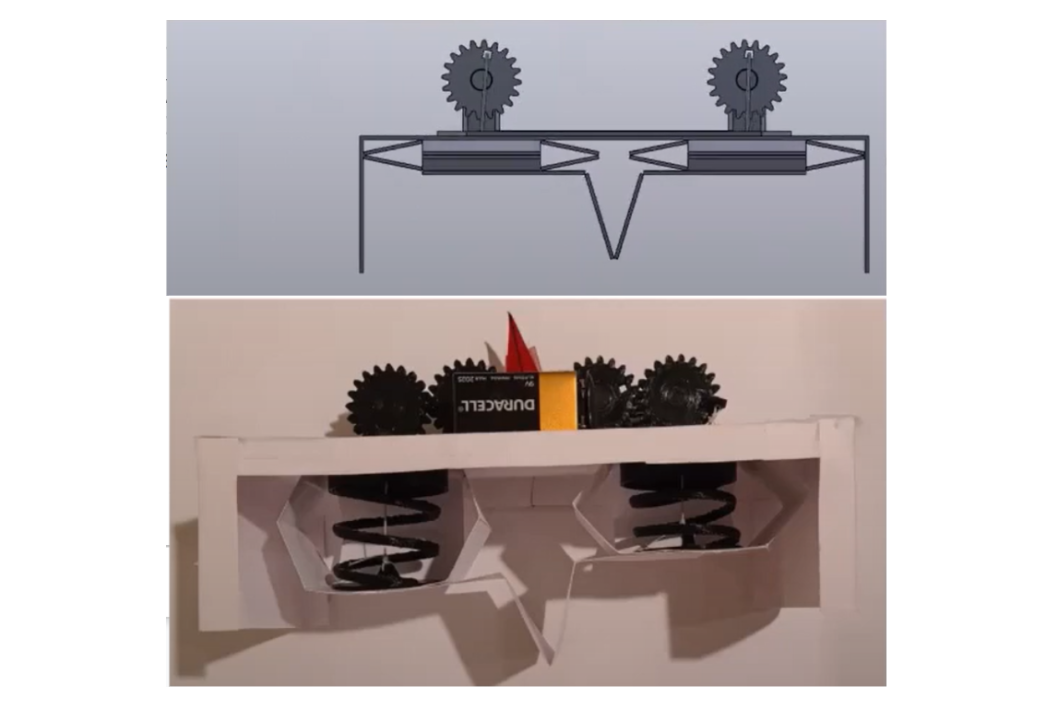
Foldable robotics are both inexpensive and capable of rapid prototyping, allowing for quick verification and testing. Here the problem of how to create unique motion through minimal actuators was explored, and a final single actuated paper leg robot was created. The paper leg was tested at different stiffness values to find the optimal leg for distance travel in a set period of time. Extensive Python kinematic and dynamic simulation was used to verify the system, and a final GitHub pages website was made to document the entire process.
Course: EGR557: Foldable Robotics (Spring 2021)
Project Type: Collaborative/Team
Keywords: Python, Rapid Prototyping, Simulation, Kinematics, Dynamics, GitHub
Return to top
Design of a Soft Passive Wearable Ankle Device

This project takes inspiration from the muscle’s anatomy in the design and testing of a soft passive ankle orthotic. A low-cost pneumatic actuator worn from the foot to the knee intends to provide dorsi and plantarflexion assistance. Through an air reservoir under the ball of the foot, the system can be passively actuated when stepped on to fill the actuator with air, extending it. Overall, the system was able to provide dorsiflexion assistance and a slight reduction in muscle effort. Verification of the system was done through filtered EMG and goniometer data, as well as force plate response to heel strikes.
Course: MAE598: Bioinspired Robotics (Spring 2021)
Project Type: Collaborative/Team
Keywords: Bioinspiration, Wearable Device, Rapid Prototyping, EMG, Gait Analysis
Return to top